20150131
オペアンプを使ったPI補償器
 前の記事
前の記事
PI制御は,ディジタルの分野で 設計のしやすさ,計算のしやすさ(CPU等負荷)の観点で優れているため 広く利用されています. 今回の記事では,アナログ分野のオペアンプを使ったPI制御を考えていきます.
■アナログ回路を使って忠実に PI補償器を作ると
|
|
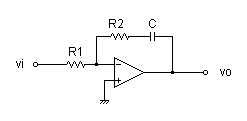
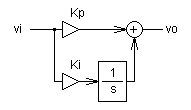
| 図1 オペアンプを使ったPI補償器 | 図2 PI補償器のブロック線図 |
図1の回路は,オペアンプを使ってPI補償器を忠実に回路にしたものです.実際の回路設計ではほとんど使われないと思いますが,後ほど紹介するPI制御と同様の機能をもつ位相補償器の解説の導入に示しました.
図1は,PI補償器の部分をオペアンプを使った回路で表しています. 入力 vi には偏差が入力され,vo は PI補償器の出力になります.
図2は,PI補償器の一般的なブロック線図で,図1の回路を理論上 等価になるモデルとして示しています.ただし,出力 vo は,オペアンプの反転増幅回路を利用していますので,負電圧で出力されます.
ここで図1における 伝達関数を求め,比例ゲイン(Kp),積分ゲイン(Ki)を求めていきます.
図2のPI補償器の伝達関数は次の通りです.
よって これらの式から,図1の回路における Kp(比例ゲイン),Ki(積分ゲイン)は
 --- (1)
--- (1)と求めることができます.
続いて,図1のPI補償回路を使った例を示します(現実的によく使用される回路ではありませんが...現実的には,こちら後半の記事非反転増幅回路を用いたLR直列回路の電流制御を参照してください).
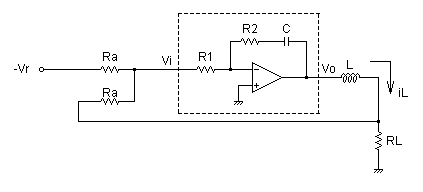
図3 PI補償回路を使ったLR直列回路の電流制御 例
電流指令:vr (上回路では負電圧で与える)
L電流:iL
偏差:Vi
操作量:vo
条件:
RL << Ra << R1
RL=1Ω
図3は,LR直列回路に与える電圧をコントロールして Lに流れる電流を制御する回路例です.
図3点線内のPI補償器を中心に解説します.
PI補償器に入力される偏差は,図3中のVi,PI補償器の出力はVoになります.このVoは,このPI補償器の出力電圧で,続いて接続されるLR直列回路に与えられる操作量(電圧)になります.
LR直列回路に電圧が与えられると,L に電流 iL が流れ,その電流は RLによって電圧として検出されフィードバックされます.図3では,便宜上 RL=1Ωとして RLにかかる電圧とiLを等しくしています.
PI補償器に入力される偏差viは,2本のRaによる加算回路によって -VrとiLの和 が算出されます.ここでL電流の指令であるVrは,図3においては,負電圧で与えるものとします.
例えば,iL=10Aとしたい場合には,-Vrの端子には,-10Vを与えることになります.Viは,次式のように求めることができます.
 --- (2)
--- (2)
ただし,VRL = RL iL = iL として
図3のPI補償器は,反転増幅回路を利用していますので正負が反転電圧で出力されます.そのため,あらかじめ指令Vr電圧の正負を反転させています.
偏差Viが求まれば,あとは通常のPI制御と同じです.
図4は一般的なフィードバック系の制御図です.この系の伝達関数は次式の通りです.
 --- (3)
--- (3)
このようなフィードバック系について,後日詳しく解説したいと思いますが,この記事では図4の系が式(4)の伝達関数になるあたりの解説は省きます.
図3点線内のPI補償器の部分をG(s),LR直列回路の部分をH(s)と考えると,図3の系は図4の制御図で表すことができます.そのときG(s),H(s)は次式の通りです.
 --- (4)
--- (4)
(4)式のKp,Kiは,通常のPI制御における比例ゲインと積分ゲインです.図3の回路においては,(2)式に示す通り偏差を回路上で計算する際に 1/2 のゲインがかかっていますので, (1)式で求めたKp,Kiに 1/2倍した値になります.
これらの式から,図3の系の伝達関数は次のように求めることができます.(途中式省略)
 --- (5)
--- (5)
フィードバック系の数学的シミュレーションはこちら
PI補償器に入力される偏差は,図3中のVi,PI補償器の出力はVoになります.このVoは,このPI補償器の出力電圧で,続いて接続されるLR直列回路に与えられる操作量(電圧)になります.
LR直列回路に電圧が与えられると,L に電流 iL が流れ,その電流は RLによって電圧として検出されフィードバックされます.図3では,便宜上 RL=1Ωとして RLにかかる電圧とiLを等しくしています.
PI補償器に入力される偏差viは,2本のRaによる加算回路によって -VrとiLの和 が算出されます.ここでL電流の指令であるVrは,図3においては,負電圧で与えるものとします.
例えば,iL=10Aとしたい場合には,-Vrの端子には,-10Vを与えることになります.Viは,次式のように求めることができます.
--- (2)ただし,VRL = RL iL = iL として
図3のPI補償器は,反転増幅回路を利用していますので正負が反転電圧で出力されます.そのため,あらかじめ指令Vr電圧の正負を反転させています.
偏差Viが求まれば,あとは通常のPI制御と同じです.
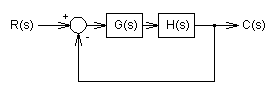
図4 一般的なフィードバック系の制御図
図4は一般的なフィードバック系の制御図です.この系の伝達関数は次式の通りです.
--- (3)このようなフィードバック系について,後日詳しく解説したいと思いますが,この記事では図4の系が式(4)の伝達関数になるあたりの解説は省きます.
図3点線内のPI補償器の部分をG(s),LR直列回路の部分をH(s)と考えると,図3の系は図4の制御図で表すことができます.そのときG(s),H(s)は次式の通りです.
--- (4)(4)式のKp,Kiは,通常のPI制御における比例ゲインと積分ゲインです.図3の回路においては,(2)式に示す通り偏差を回路上で計算する際に 1/2 のゲインがかかっていますので, (1)式で求めたKp,Kiに 1/2倍した値になります.
これらの式から,図3の系の伝達関数は次のように求めることができます.(途中式省略)
--- (5)フィードバック系の数学的シミュレーションはこちら
しかし,この例示したような回路を実機に組み込むには注意点があります.
例えば,両電源(通常電源の他に負電源)が必要になりコスト,サイズなどの点で不利になる場合があります(ただし両電源を設置すれば,図3の回路は プラス方向の電流出力にもマイナス方向の電流出力にも対応します).
一般的に,PI制御はディジタルに特化した設計になっています.オペアンプによるアナログ回路の設計では 無理にPI補償器の型に押し込める必要はないと思います. PI補償器のかわりに,アナログ回路による制御では 実践的に広く利用されている位相補償回路があります.位相補償回路は,PI補償器と機能的に 似たような働き(速い応答と偏差の小さい制御)を実現しています.
次回は,その位相補償回路について解説する予定です.