20130131
アナログ回路設計への伝達関数の利用
 前の記事
前の記事
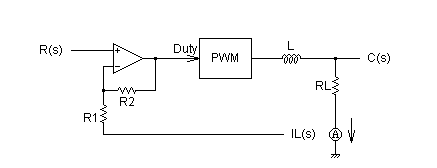
図1 ソレノイド駆動系
図1の系は,インダクタンスLと抵抗成分RLで構成されるソレノイドに流れる電流をIL(s)とし,また,その電流の目標となる電流指令をR(s)とし外部から与えられます. R(s)とIL(s)の偏差をオペアンプを使った非反転増幅回路による補償器でPWMデューティーを算出し,そのデューティーに従ってソレノイドに電力を供給する系です.ここでPWM周波数が十分大きいものとして制御部のみ抽出します.(アナログ電圧のPWM化については こちらを参照ください)
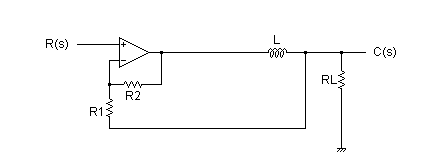
図2 制御系
RL ≪ R1 として上系の伝達関数を求めます.その前に,IL(s)とC(s)の関係はつぎの通りです.C(s)=RL IL(s)
伝達関数
 は,次の関係式より
は,次の関係式より
Voはオペアンプの出力電圧,iR1はR1電流
 −−(1)
−−(1)(1)式の伝達関数が一次遅れの系であることがわかります.そのため,いかなるパラメータ条件においても振動,発振等 起こらない安定系であると言えます. (1)式 伝達関数の制御周波数ω は,次式の通りです.
 −−(2)
−−(2)(2)式からは,R2/R1で設定される比例ゲインに応じて,制御周波数を高速化することができます.
具体的なパラメータでシミュレーションしていきます.
L: 1mH
RL: 1Ω
RL: 1Ω
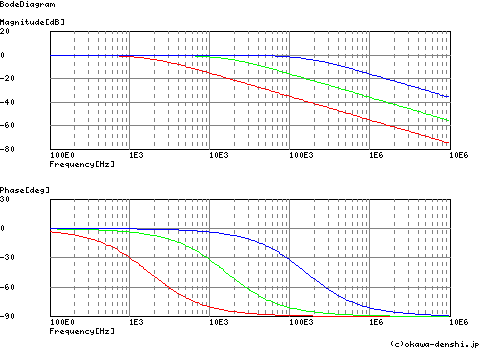
[周波数応答]
[STEP応答]
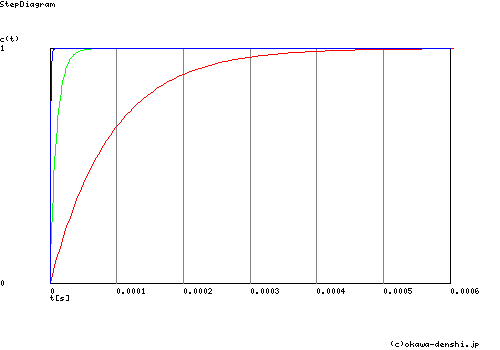
条件:
−: R2/R1 =10
−: R2/R1 =100
−: R2/R1 =1000
−: R2/R1 =100
−: R2/R1 =1000
R2/R1の比例ゲインを大きく設定するほど,ILの立ち上がりスピードを高速化できることがわかると思います.
しかしこれは,あくまで計算上の話です...,実際に,R2/R1のゲインを大きく設定すれば,ILのリップルの影響を大きく受けたり, 制御周波数よりも更にPWM周波数を高くする必要があったり,dutyの飽和(100% または 0%に はりつき)による影響 など, 考慮すべき点も多々あります.